软体机器人,颠覆你的想象
机械手爪大多是僵硬的机械臂,今天给大家介绍的是一种软体机器人。颠覆式的设计,让人耳目一新。
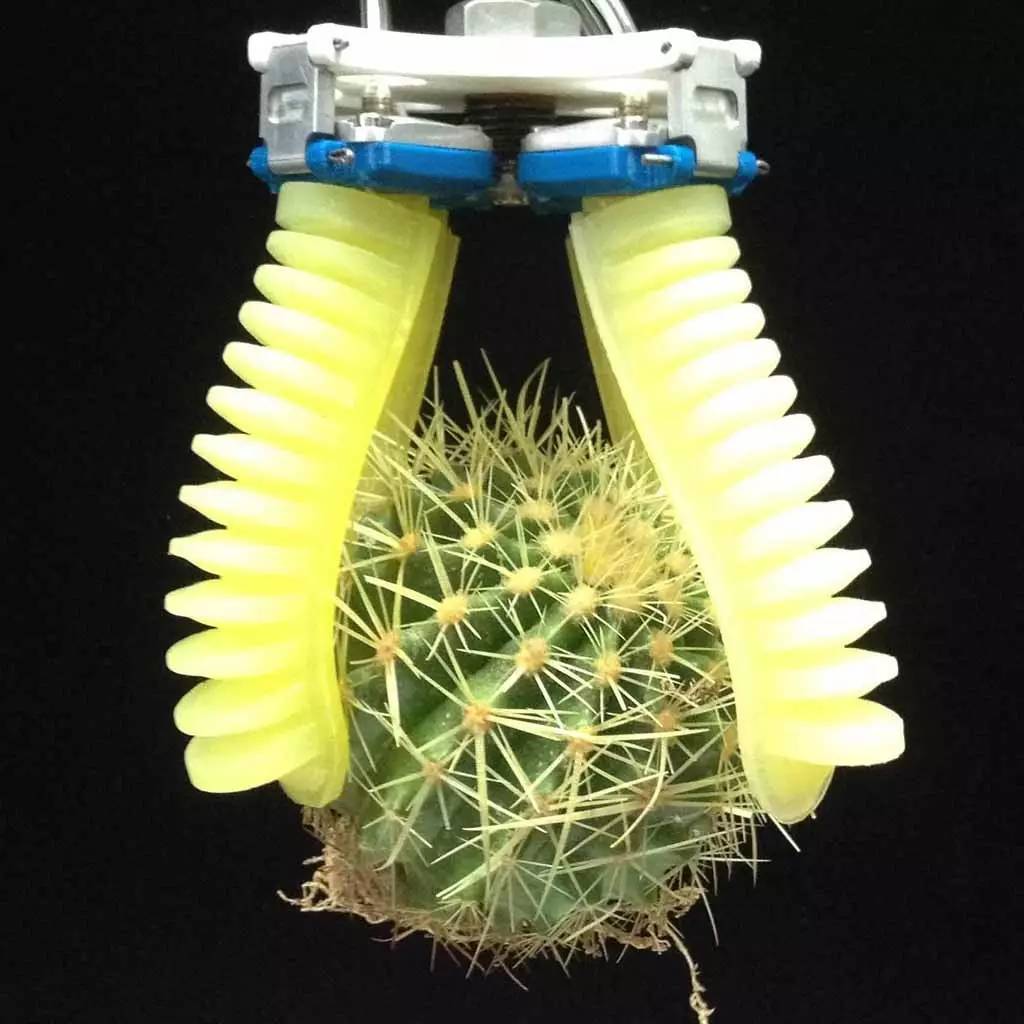
由于传统的抓取装置如机械手爪、吸盘等存在设计周期较长,更新频率较高,利润附加值较低,难以抓取易损坏、易变形物体等问题,近年来,学术界出现了“软体手”的概念,将机械手由传统的气缸等刚性体变换成柔性的有机聚合物,以克服现有传统机械手在特定应用场景的缺点。
无独有偶,近年来学术界还出现了一种颠覆式的机器人——软体机器人。现有的软体机器人在材料选取上与软体手类似,同样拥有很大的柔性,并擅长在特定的场景中应用。
不同的是,软体手只是将末端执行器设计为柔性,其机械臂和运动关节与传统的机器人没有区别;而软体机器人的机械臂也是柔性的,甚至其运动关节与传统的机器人相比也发生了改变,甚至有的软体机器人的运动副数量可以理解为无穷多。
有趣的是,虽然软体手和软体机器人并不完全相同,但是二者的发展历史却是相互交织的。2011年,哈佛大学Whitesides研究小组的学者Carl Vause,从章鱼中获得了灵感,发明了软体机器人,这款软体机器人长约18厘米,可以单“腿”离地,能在一分钟内匍匐穿过2厘米高的间隙。
一般的刚体机器人在装配上软体手之后是否应该归为软体机器人?这一问题在学术界内还有一定的争议。笔者认为,装配上软体手的刚体机器人并不是软体机器人。
在运动学和动力学上,装配上软体手的刚体机器人,其运动学公式、雅可比矩阵、海塞矩阵等基础公式并没有改变,机器人在运动学上的运动末端的位姿、速度等仍然是可预测和可控的,只是机器人的末端执行器有一点“古怪”而已,而末端执行器的种类对机器人运动学和动力学的性能没有任何影响。
而软体机器人的机械臂是柔性的,其运动学和动力学性能并不能通过传统的公式求解出来,机器人的运动学和动力学性能已经完全改变,机器人的运动末端位姿、速度等变得不可预测。
- 首页
- 上一页
- 1 / 1^
- 下一页